import torch
import matplotlib.pyplot as plt
from tqdm import tqdm
import numpy as np
import gradoptics as optics
Matplotlib created a temporary config/cache directory at /var/folders/tg/2_q32n3x5q75j4ytd6n3kmvh0000gp/T/matplotlib-kg0y83ut because the default path (/Users/stanford/.matplotlib) is not a writable directory; it is highly recommended to set the MPLCONFIGDIR environment variable to a writable directory, in particular to speed up the import of Matplotlib and to better support multiprocessing.
Point Spread Functions
# Helpers
def gaussian_kernel_1d(size, sigma=1):
x = torch.arange(-size/2, size/2, 1)
return 1 / (sigma * np.sqrt(2 * np.pi)) * torch.exp(-.5 * (x / sigma) ** 2)
def gaussian_kernel_2d(size, sigma=1):
return torch.outer(gaussian_kernel_1d(size, sigma=sigma),
gaussian_kernel_1d(size, sigma=sigma))
# Toy gaussian Psfs
for sigma in [3, 6, 9, 18]:
kernel = gaussian_kernel_2d(60, sigma=sigma)
plt.imshow(kernel.numpy(), cmap='gray')
plt.show()
In diffoptics, psfs are depth-dependent (position along the optical axis), and height-dependent (vertical position on the sensor).
Point spread functions are represented by dictionaries where the primary keys are tuple that indicate the depth at which the psfs apply, while the secondary keys indicate the height on the sensor on which the psfs apply.
inf = int(1e15)
# No psf
no_psfs = {}
# A psf that applies to all depth and all the sensor
psfs = {'data' : {(-inf, inf) : {(0, inf) : optics.PSF(gaussian_kernel_2d(45, sigma=3))}}}
# A psf that is depth-dependent
psfs = {'data' : {(-inf, -1) : {(0, inf) : optics.PSF(gaussian_kernel_2d(45, sigma=3))},
(-1, 1) : {(0, inf) : optics.PSF(gaussian_kernel_2d(45, sigma=5))},
(1, inf) : {(0, inf) : optics.PSF(gaussian_kernel_2d(45, sigma=3))}}}
# A psf that is height-dependent
psfs = {'data' : {(-inf, inf) : {(0, 1000) : optics.PSF(gaussian_kernel_2d(45, sigma=3)),
(1000, 2000) : optics.PSF(gaussian_kernel_2d(45, sigma=4)),
(2000, inf) : optics.PSF(gaussian_kernel_2d(45, sigma=5))}}}
# A psf that is depth-dependent and height-dependent
psfs = {'data' : {(-inf, -1) : {(0, 1000) : optics.PSF(gaussian_kernel_2d(45, sigma=3)),
(1000, 2000) : optics.PSF(gaussian_kernel_2d(45, sigma=4)),
(2000, inf) : optics.PSF(gaussian_kernel_2d(45, sigma=5))},
(-1, 1) : {(0, 1000) : optics.PSF(gaussian_kernel_2d(50, sigma=3)),
(1000, 2000) : optics.PSF(gaussian_kernel_2d(50, sigma=4)),
(2000, inf) : optics.PSF(gaussian_kernel_2d(50, sigma=5))},
(1, inf) : {(0, 1000) : optics.PSF(gaussian_kernel_2d(45, sigma=3)),
(1000, 2000) : optics.PSF(gaussian_kernel_2d(45, sigma=4)),
(2000, inf) : optics.PSF(gaussian_kernel_2d(45, sigma=5))}}}
# No psfs
# Creating a scene
f = 0.05
m = 0.15
lens = optics.PerfectLens(f=f, na=1 / 1.4, position=[0., 0., 0.], m=m)
sensor = optics.Sensor(position=(-f * (1 + m), 0, 0), psfs=no_psfs)
atom_cloud = optics.AtomCloud(n=int(1e6), f=2, position=[f * (1 + m) / m, 0., 0.], phi=0.1)
light_source = optics.LightSourceFromDistribution(atom_cloud)
scene = optics.Scene(light_source)
scene.add_object(lens)
scene.add_object(sensor)
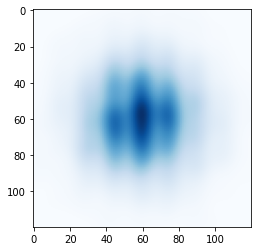
# Producing an image
device = 'cpu'
rays = light_source.sample_rays(10_000_000, device=device)
optics.forward_ray_tracing(rays, scene, max_iterations=2)
# Readout the sensor
c = (4800, 4800)
w = 60
produced_image = sensor.readout(add_poisson_noise=False).data.cpu().numpy()
plt.imshow(produced_image[c[0] - w : c[0] + w, c[1] - w : c[1] + w], cmap='Blues')
plt.show()
/Users/stanford/Library/Python/3.8/lib/python/site-packages/torch/_tensor.py:575: UserWarning: floor_divide is deprecated, and will be removed in a future version of pytorch. It currently rounds toward 0 (like the 'trunc' function NOT 'floor'). This results in incorrect rounding for negative values.
To keep the current behavior, use torch.div(a, b, rounding_mode='trunc'), or for actual floor division, use torch.div(a, b, rounding_mode='floor'). (Triggered internally at ../aten/src/ATen/native/BinaryOps.cpp:467.)
return torch.floor_divide(self, other)
# Depth-dependent and height-dependent psfs
# Creating a scene
lens = optics.PerfectLens(f=f, na=1 / 1.4, position=[0., 0., 0.], m=m)
sensor = optics.Sensor(position=(-f * (1 + m), 0, 0), psfs=psfs)
atom_cloud = optics.AtomCloud(n=int(1e6), f=2, position=[f * (1 + m) / m, 0., 0.], phi=0.1)
light_source = optics.LightSourceFromDistribution(atom_cloud)
scene = optics.Scene(light_source)
scene.add_object(lens)
scene.add_object(sensor)
# Producing an image
rays = light_source.sample_rays(10_000_000, device=device)
rays.meta['depth'] = rays.origins[:, 0] # /!\ When using psfs, the depth of the incident rays should be specified!
optics.forward_ray_tracing(rays, scene, max_iterations=2)
# Readout the sensor
produced_image = sensor.readout(add_poisson_noise=False).data.cpu().numpy()
plt.imshow(produced_image[c[0] - w : c[0] + w, c[1] - w : c[1] + w], cmap='Blues')
plt.show()